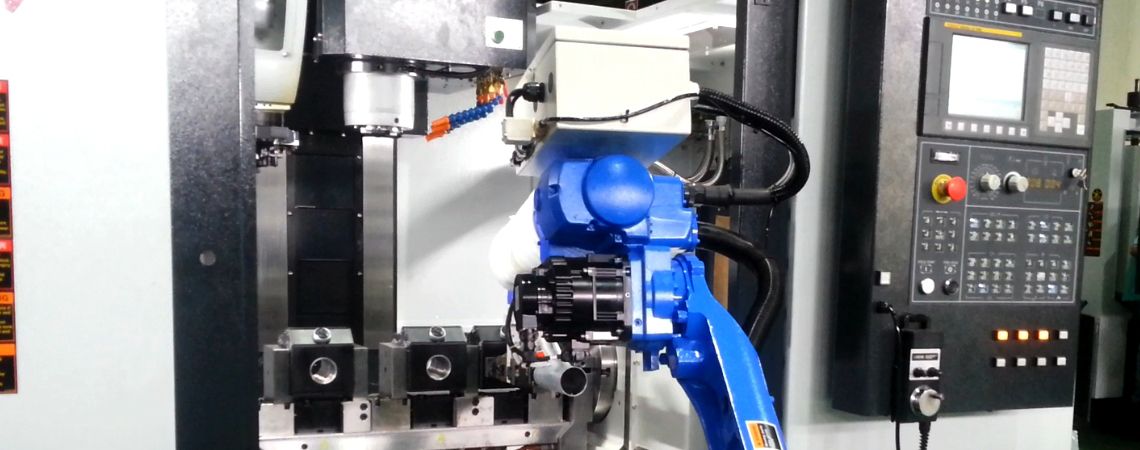
การรวมระบบการดูแลเครื่องกัด TOVONN | โซลูชันแขนหุ่นยนต์ YASKAWA
ระบบการจัดการเครื่องกัดขั้นสูงของ TOVONN's การรวมเข้ากับแขนหุ่นยนต์ YASKAWA ช่วยให้อัตโนมัติในกระบวนการโหลด/ถอดโหลด ลดต้นทุนแรงงานในขณะที่เพิ่มผลผลิต โซลูชันที่ปรับแต่งได้ของเรามีระบบหมุนชิ้นงาน ระบบการรู้จำภาพ และอุปกรณ์ตรวจสอบคุณภาพสำหรับการผลิตชิ้นส่วนหล่อโลหะ ประสบการณ์ด้านอัตโนมัติมากกว่า 20 ปีในไต้หวัน.



การรวมระบบจัดการเครื่องมิลลิ่ง
การโหลดและการขนถ่ายเครื่องมิลลิ่ง, ระบบการโหลดและการขนถ่ายเครื่องมิลลิ่ง, แขนหุ่นยนต์สำหรับการโหลดและการขนถ่ายเครื่องมิลลิ่ง, หุ่นยนต์หยิบและวางเครื่องมิลลิ่ง, แขนหุ่นยนต์สำหรับการจัดการเครื่องมิลลิ่ง
TOVONN เทคโนโลยีให้ฟังก์ชันการโหลดและการขนถ่ายเครื่องกัดแบบมืออาชีพ ระบบการโหลดและการขนถ่ายเครื่องกัด และโซลูชันแขนหุ่นยนต์สำหรับการโหลดและการขนถ่ายเครื่องกัด แก้ปัญหาต่างๆ ที่วิศวกรอาจพบเจอ.
ระบบการโหลดและการขนถ่ายของ Tovonn Technology's สามารถติดตั้งอุปกรณ์เสริมได้ เช่น: กลไกการหมุนชิ้นงาน, กลไกการนำทางชิ้นงาน, ระบบการระบุคุณลักษณะชิ้นงาน, ระบบการระบุอักขระเฉพาะ, กลไกการเป่าลมตัดเพื่อการกำจัด, อุปกรณ์ทำความสะอาดชิ้นงาน, อุปกรณ์แกะสลักด้วยเลเซอร์สำหรับข้อความและลวดลาย, ฟังก์ชันการจัดเรียงชิ้นงาน, อุปกรณ์ตรวจสอบลักษณะผลิตภัณฑ์, อุปกรณ์ตรวจสอบขนาดผลิตภัณฑ์... เป็นต้น ซึ่งตอบสนองความต้องการทั้งหมดของกระบวนการแปรรูปด้วยเครื่องมิลลิ่ง.
เหมาะสำหรับการผลิตอัตโนมัติในการจัดการชิ้นงานและการหยิบและวางชิ้นงานสำหรับเครื่องมิลลิ่งต่างๆ.
เหมาะสำหรับการประมวลผลชิ้นส่วนหล่ออลูมิเนียมอัลลอย, ชิ้นส่วนหล่อแมกนีเซียมอัลลอย, ชิ้นส่วนหล่อสังกะสีอัลลอย, ชิ้นงานทองแดงอัลลอย, และชิ้นงานหล่อด้วยแรงโน้มถ่วง.
วิศวกรที่ทำงานหนักที่รัก คุณเคยประสบปัญหาดังต่อไปนี้หรือไม่:
- การโหลดและขนถ่ายที่น่าเบื่อหน่ายบนเครื่องมิลลิ่ง แต่คุณมักจะหาผู้ปฏิบัติงานที่เหมาะสมไม่ได้?
- เครื่องมิลลิ่งใช้เวลานานในการประมวลผลชิ้นงาน เมื่อการประมวลผลเสร็จสิ้น ผู้ปฏิบัติงานไม่เปลี่ยนชิ้นงานทันที ทำให้เวลาการประมวลผลยาวนานขึ้น?
- เครื่องมิลลิ่งประมวลผลชิ้นงานที่ใช้เวลาเพียงสั้นมาก ผู้ปฏิบัติงานต้องเปลี่ยนชิ้นงานบ่อยครั้ง งานที่ทำมีมากเกินไปหรือไม่?
- ชิ้นงานต้องวางบนจิ๊กของเครื่องมิลลิ่งที่มุมเฉพาะ แต่ผู้ปฏิบัติงานมักจะมองข้ามเมื่อวาง ทำให้เกิดการประมวลผลผิดปกติและขนาดไม่ถูกต้อง?
- ขนาดที่ถูกประมวลผลโดยเครื่องมิลลิ่งผิดปกติ เมื่อเจ้าหน้าที่ตรวจสอบคุณภาพพบว่า มีชิ้นงานหลายชิ้นที่มีคุณภาพผิดปกติถูกผลิตออกมา?
หากคุณมีอาการเหล่านี้ กรุณาติดต่อ TOVONN เทคโนโลยี และทั้งสองฝ่ายจะหารือและวางแผนวิธีการโหลดและขนถ่ายชิ้นงานของเครื่องกัดและเข้าสู่โลกของการทำงานอัตโนมัติ
การปรับปรุงกระบวนการดูแลเครื่องกัด: TOVONN เทคโนโลยีให้โซลูชันการโหลดและการขนถ่ายที่รวมเข้าด้วยกันสำหรับแขนหุ่นยนต์
เทคโนโลยี TOVONN ให้บริการการรวมระบบการถอดแขนหุ่นยนต์อย่างครบวงจร และร่วมมือกับผู้ผลิตแขนหุ่นยนต์รวมถึง YASKAWA, ABB และ FANUC ขอบเขตการบริการของเรารวมถึงการตั้งค่าและการเลือกแขนหุ่นยนต์ การวางแผนการเคลื่อนไหวสำหรับการโหลดและการขนถ่าย การออกแบบกรรไกรจับและระบบควบคุมสำหรับการโหลดและการขนถ่าย รวมถึงการดีบักและการเขียนโปรแกรมสำหรับชิ้นงานเฉพาะ.
ระบบการโหลดและปล่อยของเครื่องมิลลิ่งสามารถตอบสนองความต้องการการป้อนของลูกค้าและสามารถจับคู่กับระบบการป้อนที่แตกต่างกัน เช่น: ระบบการป้อนด้วยโต๊ะเลื่อนด้านหน้าและด้านหลัง, ระบบการป้อนด้วยสายพานลำเลียง, ระบบการป้อนด้วยพาเลท, ระบบการป้อนในคลังสินค้า, และระบบการป้อนแบบซ้อนทับ ระบบวัสดุ, ระบบการป้อนด้วยการรู้จำภาพ...ฯลฯ.
หากมีความจำเป็นต้องกลับชิ้นงานในโปรแกรมการประมวลผลของเครื่องกัด สามารถติดตั้งกลไกการกลับชิ้นงานเพื่อเปลี่ยนมุมของชิ้นงานให้ตรงตามความต้องการของตำแหน่งการยึดที่แตกต่างกันของเครื่องกัดได้.
ระบบการโหลดและถอดเครื่องกัดสามารถใช้กับเครื่องกัดและเครื่องกลึงหลายเครื่องเพื่อตอบสนองกระบวนการผลิตที่หลากหลายได้. TOVONN เทคโนโลยีจะช่วยให้ลูกค้าคำนวณตัวเลือกการกำหนดค่าของเครื่องจักรที่เหมาะสมตามเวลาการประมวลผลของกระบวนการต่างๆ เพื่อเพิ่มผลผลิตให้สูงสุด. TOVONN เทคโนโลยีได้สร้างการรวมกันของเครื่องจักรที่ซับซ้อนมากขึ้น: แขนหุ่นยนต์สองข้างพร้อมกับเครื่องกลึง, เครื่องเจาะและต๊าป, และเครื่องมิลลิ่งสามเครื่อง. พวกเขาสามารถแบ่งออกเป็นสองพื้นที่ที่เป็นอิสระสำหรับการประมวลผลแยกต่างหาก หรือสามารถรวมกันได้. ดำเนินการประมวลผลที่ซับซ้อน.
เมื่อชิ้นงานและเครื่องมือกัดมีความต้องการมุมการวางตำแหน่ง ระบบการรู้จำภาพ (CCD) สามารถใช้เพื่อระบุลักษณะของชิ้นงานหรืออักขระเฉพาะ เพื่อให้ที่หนีบในการโหลดและถอดสามารถหนีบชิ้นงานที่มุมที่ถูกต้อง และยังสามารถกำจัดการผสมของชิ้นงานประเภทอื่น ๆ ที่อาจทำให้คุณภาพผิดปกติได้.
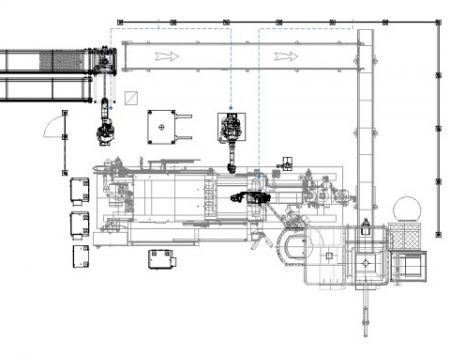
ในขั้นตอนการวางแผนและการรวมระบบ เราจะวางเครื่องกัด แขนหุ่นยนต์ และอุปกรณ์เสริมลงในแผนผังพื้น 2D เพื่อหารือเกี่ยวกับกระบวนการโหลดและขนถ่ายและขอบเขตของกิจกรรม หากจำเป็น เราจะใช้ซอฟต์แวร์จำลอง 3D เพื่อกำหนดพื้นที่ทำงานและพื้นที่ติดตั้งเพื่อเตรียมความพร้อมสำหรับการเขียนโปรแกรมในสถานที่ในภายหลัง ซึ่งจะวางรากฐาน ลดเวลาในการสำรวจและทดลองในสถานที่ และรับประกันกระบวนการรวมระบบที่มีประสิทธิภาพ.
TOVONN เทคโนโลยีมีความสามารถและประสบการณ์ในการรวมเทคโนโลยีการโหลดและการขนถ่ายเข้ากับแขนหุ่นยนต์, เครื่องมิลลิ่ง, และอุปกรณ์การประมวลผล กรุณาติดต่อเราวันนี้เพื่อเรียนรู้ว่าโซลูชันการรวมแขนหุ่นยนต์ของเราสามารถปรับปรุงกระบวนการโหลดและการขนถ่ายของคุณและตอบสนองความต้องการด้านอัตโนมัติของคุณได้อย่างไร.
คุณสมบัติ
- กลไกการยึดชิ้นงาน: ตามลักษณะของชิ้นงานของลูกค้า สามารถเลือกใช้ที่ยึดแบบสามกร jaws, ที่ยึดแบบสองกร jaws, ถ้วยดูดสุญญากาศ, อิเล็กโทรแมกเนต เป็นต้น เพื่อประหยัดเวลาในการเคลื่อนที่ โดยปกติจะมีหลายกลไกการยึดเพื่อยึดชิ้นงานที่ยังไม่ได้ประมวลผลและชิ้นงานที่ประมวลผลแล้วแยกกัน.
- สำหรับปริมาณการติดตั้งเฉพาะหรือข้อมูลจำเพาะที่ละเอียด โปรดติดต่อเทคโนโลยี TOVONN เพื่อหารือ.
- สอดคล้องกับลักษณะของจิ๊กของเครื่องกัด กลไกการยึดชิ้นงานเป็นทางเลือก: กลไกการดันเพื่อช่วยกรรไกรยึดในการวางชิ้นงานลงในจิ๊กของเครื่องกัด.
- เนื่องจากความแตกต่างในตำแหน่งและมุมของชิ้นงานที่เกิดจากวิธีการป้อนขนาดใหญ่ หรือเมื่อกระบวนการกัดต้องการเปลี่ยนตำแหน่งการยึดชิ้นงาน สามารถติดตั้ง: กลไกการหมุนชิ้นงานและกลไกการนำทางชิ้นงานได้.
- เมื่อชิ้นงานมีรูปทรงพิเศษหรือข้อความหรือสัญลักษณ์เฉพาะ และต้องวางบนจิ๊กของเครื่องมิลลิ่งที่มุมเฉพาะ สามารถใช้ร่วมกับ: ระบบการระบุคุณลักษณะของชิ้นงาน, ระบบการระบุข้อความเฉพาะ, และระบบการระบุด้วยภาพที่ง่ายสำหรับการระบุ.
- เพื่อหลีกเลี่ยงความผิดปกติในคุณภาพการประมวลผลเนื่องจากการสึกหรอหรือการแตกหักของเครื่องมือกัด คุณสามารถใช้: อุปกรณ์ตรวจสอบลักษณะผลิตภัณฑ์และอุปกรณ์ตรวจสอบขนาดผลิตภัณฑ์เพื่อให้ได้การตรวจสอบคุณภาพ 100%.
-
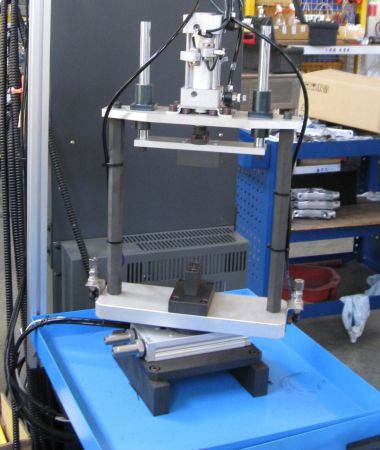
 อุปกรณ์นำทางชิ้นงาน
อุปกรณ์นำทางชิ้นงาน -
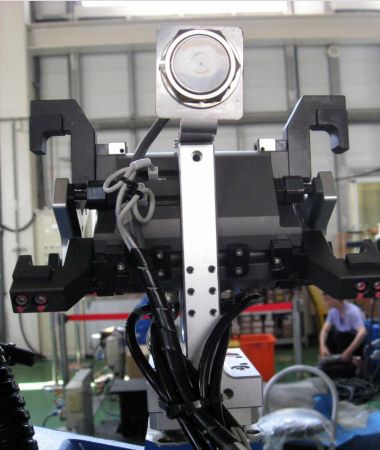
 ที่จับสำหรับการดูแลเครื่องกัด
ที่จับสำหรับการดูแลเครื่องกัด -
 ระบบการให้อาหารชิ้นงาน
ระบบการให้อาหารชิ้นงาน -
 กลไกการหมุนชิ้นงาน
กลไกการหมุนชิ้นงาน



ข้อดีของผลิตภัณฑ์
● ปฏิบัติตามข้อกำหนด ESG:
➔ เป้าหมายที่ 8: ส่งเสริมการเติบโตทางเศรษฐกิจที่ยั่งยืน ครอบคลุม และยั่งยืน การจ้างงานที่เต็มที่และมีประสิทธิผล และการทำงานที่เพียงพอสำหรับทุกคน.
➔ 8.2 เพิ่มความสามารถในการผลิตของเศรษฐกิจผ่านการกระจายความหลากหลาย การปรับปรุงเทคโนโลยี และนวัตกรรม รวมถึงการมุ่งเน้นไปที่อุตสาหกรรมที่มีมูลค่าเพิ่มสูงและใช้แรงงานเข้มข้น.
➔ 8.8 ปกป้องสิทธิและผลประโยชน์ของคนงานและส่งเสริมสภาพแวดล้อมการทำงานที่ปลอดภัย รวมถึงคนงานข้ามชาติ โดยเฉพาะผู้หญิงและคนงานที่ทำงานในสภาพอันตราย.
● ประหยัดค่าแรง: ใช้ความยืดหยุ่นของแขนหุ่นยนต์และอุปกรณ์เสริมในการทำให้กระบวนการผลิตการโหลดและการขนถ่ายเครื่องกัดเป็นอัตโนมัติและลดความต้องการแรงงาน.
● การป้องกันความปลอดภัยของบุคลากร: เมื่อคนงานโหลดและขนถ่ายวัสดุบนเครื่องกัด พวกเขาต้องใส่แขนลึกเข้าไปในเครื่องกัดเพื่อเอาชิ้นงานออกและวางชิ้นงานลง. มีข้อกังวลด้านความปลอดภัยบางประการ. อุบัติเหตุที่น่าเสียดาย เช่น นิ้วถูกตัดโดยขอบคมของชิ้นงานหรือนิ้วถูกหนีบโดยปากจับมักเกิดขึ้นบ่อยครั้ง. เหตุการณ์หนึ่ง. การทำให้การโหลดและการขนถ่ายเป็นอัตโนมัติจะเป็นประโยชน์อย่างมากต่อการปกป้องสุขภาพของคนงาน และสุขภาพของพนักงานเป็นผลประโยชน์ที่ใหญ่ที่สุดของบริษัท.
ตารางเปรียบเทียบฟังก์ชันกับการโหลดและขนถ่ายแบบดั้งเดิม
| การโหลดและขนถ่ายด้วยมือ | หุ่นยนต์ดูแลเครื่องจักร | |
|---|---|---|
| ความยืดหยุ่นในการหยิบและวาง | สูง การวางชิ้นงานสามารถจับคู่กับที่จับและจิ๊กเกือบทุกชนิดได้. |
กลาง ต้องการความร่วมมือระหว่างกรามจับและจิ๊ก. |
| ความเสถียรในการหยิบและวาง | สูง อย่างไรก็ตาม การกระทำในการหยิบและวางที่ซ้ำซากและน่าเบื่อสามารถทำให้บุคลากรเหนื่อยล้าและนำไปสู่ข้อผิดพลาดได้。 |
สูง ด้วยความช่วยเหลือจากอุปกรณ์เสริม รักษาจังหวะการผลิตที่แน่นอน. |
| เวลารับและส่ง | รวดเร็ว มือของมนุษย์มีอำนาจทุกอย่าง. |
ช้า จำกัดโดยการออกแบบและจำนวนของกรรไกรจับ. |
| ตรวจสอบฟีเจอร์ | รวดเร็ว แต่ก็ง่ายที่จะมองข้ามมันไปเพราะความเหนื่อยล้า. |
กลาง การตรวจสอบความเสถียรตามเส้นทางที่ตั้งโปรแกรมไว้. |
การรวมระบบอัตโนมัติของแขนหุ่นยนต์.



คุณสามารถเรียกคืนเวลาในการผลิตได้มากแค่ไหนด้วยการดูแลเครื่องกัดอัตโนมัติ?
ผู้จัดการฝ่ายผลิตรายงานผลการเพิ่มผลผลิต 30-40% อย่างสม่ำเสมอหลังจากการนำระบบดูแลเครื่องจักรกลมิลลิ่งของ TOVONN's มาใช้. โซลูชันหุ่นยนต์ของเราขจัดความล่าช้าที่เกิดขึ้นเมื่อผู้ปฏิบัติงานไม่สามารถโหลด/ถอดชิ้นส่วนได้ทันทีหลังจากการทำงานเสร็จสิ้น. ระบบรักษาจังหวะการผลิตที่สม่ำเสมอตลอด 24 ชั่วโมง 7 วัน โดยไม่มีการหยุดพักหรือการเปลี่ยนกะที่รบกวนการทำงาน. สำหรับการดำเนินงานในรอบสั้นที่ต้องการการเปลี่ยนชิ้นส่วนบ่อย ๆ การออกแบบมัลติกริปเปอร์ของเราสามารถจัดการชิ้นงานดิบและชิ้นงานสำเร็จรูปได้พร้อมกัน ซึ่งช่วยลดเวลาในการทำงานได้มากขึ้น. คำนวณการเพิ่มผลผลิตที่เป็นไปได้ของคุณโดยการวิเคราะห์เวลาที่เครื่องของคุณว่างระหว่างการทำงาน.
ด้วยประสบการณ์ด้านการทำงานอัตโนมัติมากกว่า 20 ปี ระบบที่รวมเข้ากับ TOVONN's สามารถปรับแต่งได้อย่างเต็มที่เพื่อตอบสนองต่อวิธีการให้อาหารที่หลากหลาย รวมถึงโต๊ะเลื่อน, สายพานลำเลียง, พาเลท, และระบบคลังสินค้า. ทีมวิศวกรรมของเราทำการวิเคราะห์กระบวนการทำงานอย่างละเอียดโดยใช้แผนผังชั้น 2D และซอฟต์แวร์จำลอง 3D เพื่อเพิ่มประสิทธิภาพในการวางตำแหน่งแขนหุ่นยนต์ เส้นทางการเคลื่อนไหว และเวลาในการทำงาน. ผลลัพธ์คือการบูรณาการที่ไร้รอยต่อซึ่งเพิ่มประสิทธิภาพการใช้เครื่องจักร ลดต้นทุนการผลิต และเพิ่มความปลอดภัยในที่ทำงาน—ทั้งหมดนี้ในขณะที่สนับสนุนวัตถุประสงค์ ESG ของคุณผ่านการผลิตที่ยั่งยืนและการปรับปรุงสภาพการทำงานของคนงาน.