TOVONN แขนหุ่นยนต์สำหรับการดึงหล่อแบบตายตัว | โซลูชันการหล่ออัตโนมัติ
TOVONN's แขนหุ่นยนต์สำหรับการดึงออกจากการหล่อโลหะด้วยแม่พิมพ์นำเสนอวิธีการอัตโนมัติที่ทันสมัยสำหรับผู้ผลิตการหล่อโลหะด้วยแม่พิมพ์ ระบบการดึงของเราถูกผสานเข้ากับหุ่นยนต์ YASKAWA, FANUC และ ABB เพื่อเพิ่มประสิทธิภาพการผลิต ลดต้นทุนแรงงาน และเพิ่มความปลอดภัยของคนงาน ปรับแต่งสำหรับกระบวนการหล่อโลหะด้วยแม่พิมพ์ทั้งแบบห้องเย็นและร้อนด้วยประสบการณ์มากกว่า 20 ปี.




แขนหุ่นยนต์ดึงออกจากการหล่อ
การดึงชิ้นส่วนหล่อ, ระบบการดึง, หุ่นยนต์การดึง, แขนหุ่นยนต์อุตสาหกรรมการดึงหล่อ
แขนหุ่นยนต์สำหรับการดึงหล่อโลหะที่พัฒนาโดยเทคโนโลยี TOVONN ให้บริการโซลูชันการดึงหล่อโลหะอย่างมืออาชีพ แก้ไขปัญหาหลายประการที่วิศวกรหล่อโลหะอาจพบเจอ ระบบการสกัดของเราจากเทคโนโลยี TOVONN ยังสามารถรวมเข้ากับฟังก์ชันต่างๆ เช่น การวางการแทรก, การทำให้เย็นด้วยการหล่อ, การแตกของบ่อเกิน, และการตัดแต่งทางเข้า ซึ่งตอบสนองความต้องการทั้งหมดของกระบวนการหล่อโลหะ. เหมาะสำหรับการดึงออกด้วยการหล่อแบบตายทั้งในเครื่องหล่อแบบห้องเย็นและห้องร้อน. เหมาะสำหรับการผลิตในกระบวนการหล่ออลูมิเนียม, หล่อแมกนีเซียม, และหล่อสังกะสี.
วิศวกรหล่ออาจพบกับความท้าทายต่อไปนี้:
- สปรูในแม่พิมพ์ยาวเกินไป ทำให้เกิดการรบกวนกับการเข้าและออกของเครื่องขุดเจาะแบบดั้งเดิม ทำให้ไม่สามารถนำชิ้นงานหล่อออกได้ ต้องใช้ความพยายามด้วยมือเพิ่มเติมในการจับและนำชิ้นงานหล่อออก.
- ในกรณีของแม่พิมพ์หล่อที่มีสามส่วน พื้นที่ภายในแคบเกินไปสำหรับเครื่องขุดเจาะแบบดั้งเดิมที่จะเข้าไป ทำให้ต้องมีความช่วยเหลือด้วยมือเพิ่มเติมในการนำชิ้นงานหล่อออก.
- หลังจากการขุดเจาะชิ้นงานหล่อ จะต้องมีการนำรันเนอร์และบ่อเกินออกด้วยมือหรือเครื่องมือ อย่างไรก็ตาม พื้นผิวที่แตกของประตูไม่เรียบ และอาจทำให้มุมหายไป ส่งผลให้ชิ้นงานหล่อมีข้อบกพร่อง.
หากคุณกำลังประสบปัญหาเหล่านี้ โปรดติดต่อ TOVONN Technology มาพูดคุยและวางแผนว่าเราจะทำให้การขุดเจาะชิ้นงานหล่อเป็นอัตโนมัติและก้าวเข้าสู่โลกของอัตโนมัติด้วยกันอย่างไร.
การปรับปรุงกระบวนการขุดเจาะ: TOVONN TECHNOLOGY CORPORATION มีโซลูชันที่รวมเข้ากับการขุดเจาะด้วยแขนหุ่นยนต์.
TOVONN TECHNOLOGY CORPORATION ให้บริการแบบครบวงจรสำหรับการดึงแขนหุ่นยนต์ คู่ค้าร่วมของเราที่ผลิตแขนหุ่นยนต์ ได้แก่ YASKAWA, ABB และ FANUC เป็นต้น ขอบเขตบริการของเราครอบคลุมการจัดหาแขนหุ่นยนต์, ที่จับการดึง, ระบบควบคุม รวมถึงการเขียนโปรแกรมที่ปรับให้เหมาะกับการหล่อเฉพาะ.
ระบบการสกัดสามารถรวมฟังก์ชันต่างๆ เช่น การแทรกการฝังตัว, การหล่อเย็น, การแตกบ่อเกิน, และการตัดแต่งการเจาะ, ทำให้กระบวนการอัตโนมัติสำหรับการสกัดการหล่อแบบตายสมบูรณ์ สำหรับการหล่อจากเครื่องหล่อแบบห้องร้อน ระบบยังสามารถรวมฟังก์ชันการพ่น, ทำให้สามารถสกัดและพ่นพร้อมกันเพื่อประหยัดเวลาในรอบการทำงาน.
หลังจากที่แขนหุ่นยนต์ดึงชิ้นหล่อออกมาแล้ว สามารถใช้ตัวตรวจจับเซนเซอร์เพื่อตรวจสอบว่าชิ้นหล่อได้ออกจากแม่พิมพ์อย่างสมบูรณ์หรือไม่. หากเครื่องหล่อโลหะมีความสามารถในการตรวจจับการฉีด มันสามารถแจ้งให้แขนหุ่นยนต์ทราบเกี่ยวกับคุณภาพของการผลิต ทำให้สามารถวางในพื้นที่ต่างๆ ได้. สำหรับลูกค้าที่ต้องการการทำงานอัตโนมัติมากขึ้น การเชื่อมต่อกับถังน้ำหล่อเย็นสามารถทำให้การหล่อเย็นก่อนที่น้ำจะล้นออกมาได้ ลดของเสียและปริมาณ. การหล่อที่ไม่ทนต่อน้ำหล่อเย็นสามารถพิจารณาการใช้แร็คที่ระบายความร้อนด้วยอากาศ โดยใช้พัดลมสำหรับการระบายความร้อนตามธรรมชาติ.
การหล่อที่มีระยะเวลาการผลิตที่สั้นกว่าสามารถวางลงบนสายพานได้โดยตรงโดยแขนหุ่นยนต์ สำหรับการหล่อที่มีระยะเวลานานกว่า การประสานงานกับเครื่องกดเจาะสามารถตัดรันเนอร์, ประตูน้ำล้น, และการหล่ออื่น ๆ ร่วมกับการตัดด้วยแม่พิมพ์เพื่อลดชั่วโมงการทำงานด้วยมือในภายหลัง สำหรับการหล่อหลายช่องด้วยการออกแบบแม่พิมพ์ที่เหมาะสม การหล่อจากช่องที่แตกต่างกันสามารถแยกออกจากกันได้ในระหว่างการวาง.
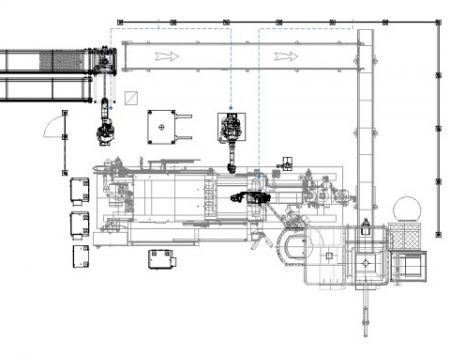
ในระยะการวางแผนการรวมระบบ เราใช้ซอฟต์แวร์การจำลอง 3D เพื่อกำหนดพื้นที่ทำงานและพื้นที่ติดตั้ง ซึ่งเป็นการวางรากฐานสำหรับการเขียนโปรแกรมในสถานที่ในภายหลัง. TOVONN เทคโนโลยีมีความสามารถในการรวมเทคโนโลยีการสกัดเข้ากับแขนหุ่นยนต์และเครื่องหล่อโลหะ. เครื่องจักรที่เคยเชื่อมต่อรวมถึง TOYO, TOSHIBA, TBC, HISHINUMA, BUHLER, UBE, FRECH, Prince, Italpresse, LK, Shing Hing, Alitai และอื่นๆ.
ติดต่อเราตอนนี้เพื่อเข้าใจว่าโซลูชันการรวมแขนหุ่นยนต์ของเราสามารถปรับปรุงกระบวนการขุดเจาะของคุณและตอบสนองความต้องการด้านอัตโนมัติของคุณได้อย่างไร.
คุณสมบัติ
● กลไกการดึงหัวเครื่อง:
ที่จับขนาน 3 ปาก ออกแบบมาเป็นหลักสำหรับหัวเครื่องหล่อมาตรฐานในเครื่องหล่อแบบห้องเย็นขนาดกลางและเล็ก ต้องปรับตำแหน่งการติดตั้งกรงเล็บให้ตรงกับขนาดหัวเครื่องที่กำหนด.
● กลไกการดึงหัวเครื่อง:
ที่จับขนาน 2 ปาก ออกแบบมาสำหรับหัวเครื่องหล่อมาตรฐานในเครื่องหล่อแบบห้องร้อนหรือหัวเครื่องของแม่พิมพ์ 3 ชิ้นในเครื่องหล่อแบบห้องเย็น ต้องเปลี่ยนขนาดกรงเล็บให้ตรงกับขนาดหัวเครื่องที่แตกต่างกัน.
● กลไกการดึงหัวเครื่อง:
ที่จับประเภทข้อศอกที่มีแรงจับแน่นหนา เหมาะสำหรับเครื่องหล่อขนาดกลางถึงใหญ่ขนาด 800 ~ 1800 ตันหรือใหญ่กว่า ต้องเปลี่ยนขนาดกรงเล็บให้ตรงกับขนาดหัวเครื่องที่แตกต่างกัน.
● การติดตั้งระบบการดึง:
ระบบสามารถติดตั้งกลไกการดึงหัวและที่จับยึดหรือที่จับกดหลายตัวเพื่อการดึงชิ้นงานหล่อเพิ่มเติม สำหรับจำนวนการติดตั้งเฉพาะหรือข้อมูลจำเพาะที่ละเอียด โปรดติดต่อเทคโนโลยี TOVONN.
● ความยืดหยุ่นของแขนหุ่นยนต์:
แขนหุ่นยนต์มีฟังก์ชันการควบคุมเซอร์โวที่ยืดหยุ่น หลังจากจับหัวจับหล่อแล้ว มันสามารถทำงานร่วมกับฟังก์ชันการดันของเครื่องหล่อโลหะได้อย่างมีประสิทธิภาพ เพื่อให้การดึงชิ้นงานออกจากแม่พิมพ์หล่อมีความเสถียร เพื่อรักษาความแม่นยำของการตัดเฉือนด้วยเครื่องกดในขั้นตอนถัดไป.
● การรวมเซ็นเซอร์ตรวจจับ:
แขนหุ่นยนต์ที่รวมกับเซ็นเซอร์ตรวจจับการดึงสามารถตรวจจับลักษณะหลายอย่างของการหล่อได้ ซึ่งทำให้มั่นใจได้ว่าการหล่อได้ถูกนำออกจากพื้นผิวแม่พิมพ์แล้ว ซึ่งช่วยป้องกันการตกค้างบนแม่พิมพ์และหลีกเลี่ยงความเสียหายต่อแม่พิมพ์ในรอบการผลิตถัดไป.
● การสื่อสารกับเครื่องหล่อโลหะ:
เครื่องหล่อโลหะสามารถแจ้งให้แขนหุ่นยนต์ทราบได้ว่าชิ้นงานที่จับอยู่เป็นผลิตภัณฑ์ที่ดีหรือมีข้อบกพร่อง แขนหุ่นยนต์สามารถตอบสนองตามสัญญาณได้.
● ความเข้ากันได้ของระบบระบายความร้อน:
ระบบการดึงสามารถจับคู่กับถังน้ำเย็นหรือแร็คระบายความร้อนด้วยอากาศเพื่อช่วยลดอุณหภูมิของชิ้นงาน สำหรับข้อมูลจำเพาะที่ละเอียด กรุณาติดต่อเทคโนโลยี TOVONN.
● ฟีเจอร์เพิ่มเติม:
➔ แขนหุ่นยนต์สามารถติดตั้งอุปกรณ์ทำลายบ่อเกินเพื่อกำจัดบ่อเกินและลดปริมาณของชิ้นงาน.
➔ แขนหุ่นยนต์สามารถจับคู่กับเครื่องกดเจาะและแม่พิมพ์ตัดเพื่อลบเศษและประตูต่างๆ ทิ้งไว้เฉพาะตัวหล่อ ด้วยที่จับเครื่องกดเจาะเพิ่มเติม ตัวหล่อสามารถถูกจับ ยกออกจากแม่พิมพ์เจาะ และวางบนสายพานลำเลียงได้.
➔ ระบบการสกัดที่รวมกับเครื่องป้อนการแทรกช่วยให้สามารถทำการอุ่นล่วงหน้าหรือการตรวจสอบการแทรก, ปลอกเหล็ก, และส่วนประกอบอื่น ๆ ได้ แขนหุ่นยนต์ที่ติดตั้งที่จับการแทรกสามารถวางการแทรกลงในแม่พิมพ์หล่อเพื่อการผลิตได้.
-
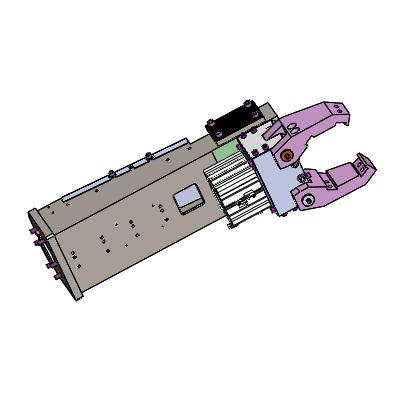
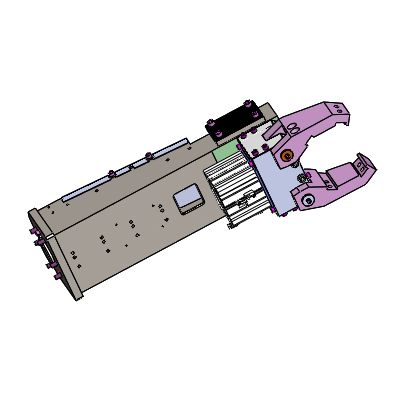 ที่จับเครื่องดึงแบบหล่อ - ประเภทที่จับข้อศอก
ที่จับเครื่องดึงแบบหล่อ - ประเภทที่จับข้อศอก -
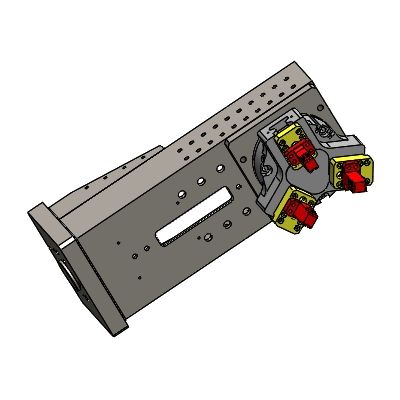
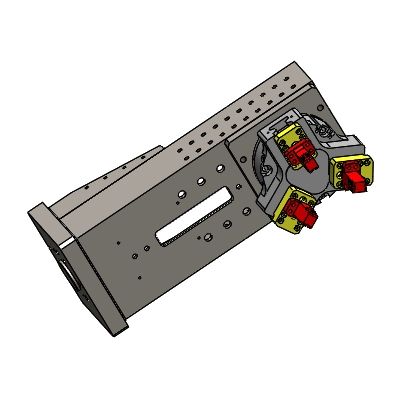 ที่จับเครื่องดึงแบบหล่อ - ประเภทที่จับ 3 ปาก
ที่จับเครื่องดึงแบบหล่อ - ประเภทที่จับ 3 ปาก -
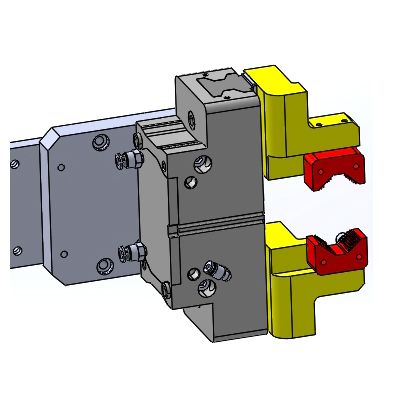
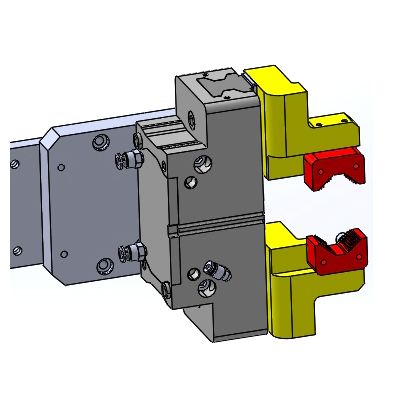 ที่จับเครื่องดึงแบบหล่อ - ประเภทที่จับ 2 ปาก
ที่จับเครื่องดึงแบบหล่อ - ประเภทที่จับ 2 ปาก -
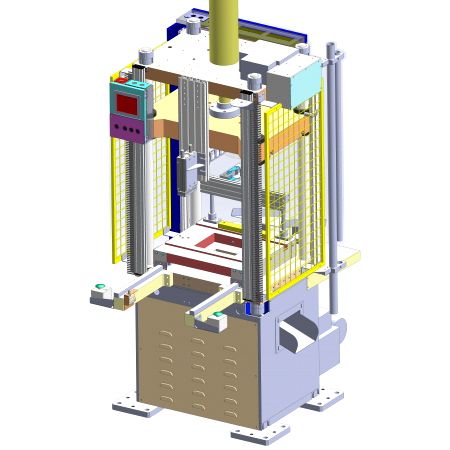
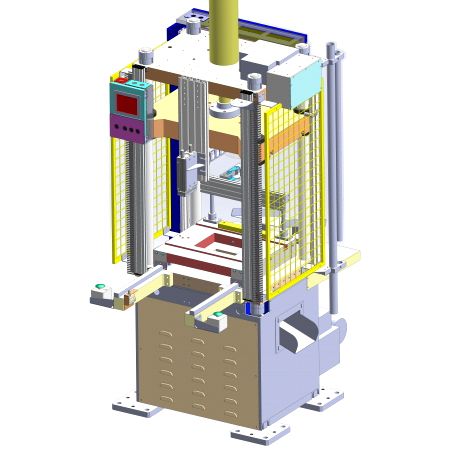 เครื่องกดเจาะขอบไฮดรอลิก - 25 ตัน
เครื่องกดเจาะขอบไฮดรอลิก - 25 ตัน
ข้อดีของผลิตภัณฑ์
● ตรงตามข้อกำหนด ESG:
➔ เป้าหมายที่ 8: ส่งเสริมการเติบโตทางเศรษฐกิจที่ยั่งยืน รวมถึงการจ้างงานที่เต็มที่และมีประสิทธิผล และการทำงานที่มีคุณภาพสำหรับทุกคน.
➔ 8.2 เพิ่มผลผลิตทางเศรษฐกิจผ่านการกระจายความหลากหลาย การปรับปรุงเทคโนโลยี และนวัตกรรม โดยมุ่งเน้นไปที่อุตสาหกรรมที่มีมูลค่าสูงและใช้แรงงานเข้มข้น.
➔ 8.8 ปกป้องสิทธิแรงงาน ส่งเสริมสภาพแวดล้อมการทำงานที่ปลอดภัย รวมถึงสำหรับแรงงานข้ามชาติ โดยเฉพาะผู้หญิง และผู้ที่ทำงานในสภาพแวดล้อมที่อันตราย.
● การประหยัดต้นทุนแรงงาน: รวมเครื่องพับที่มีการไหลล้น, เครื่องเจาะ, และแม่พิมพ์เพื่อทำให้กระบวนการผลิตการหล่อโลหะอัตโนมัติ ซึ่งจะลดความถี่ในการจัดการวัสดุและเวลาการประมวลผลด้วยมือ ทำให้ความต้องการแรงงานลดลงในที่สุด.
● การป้องกันความปลอดภัยของบุคลากร: ในอดีต การทำงานด้วยมือทำให้คนงานต้องสวมถุงมือทนความร้อนและยื่นมือเข้าไปในแม่พิมพ์เพื่อดึงหรือวางชิ้นงาน โดยที่แขนยื่นเข้าไปในพื้นที่ทำงานของเครื่องหล่อโลหะ ซึ่งมักนำไปสู่เหตุการณ์ที่ไม่พึงประสงค์ในที่ทำงาน เช่น แขนหรือมือถูกบีบ และการตัดอวัยวะ การปกป้องสุขภาพของคนงานมีประโยชน์อย่างมาก และความเป็นอยู่ที่ดีของพนักงานเป็นสิ่งที่บริษัทให้ความสำคัญเป็นอันดับแรก.
ตารางเปรียบเทียบฟังก์ชันกับเครื่องดูดแบบดั้งเดิม.
| เครื่องดูดแบบดั้งเดิม. | TOVONN แขนหุ่นยนต์สำหรับการสกัด | |
|---|---|---|
| จุดบอดในการสกัด | หลาย หากมีอุปสรรคเฉียงหรือการรบกวนจากไฮดรอลิก อาจไม่สามารถเข้าไปได้. |
น้อย เมื่อจับคู่กับหุ่นยนต์หกแกน จะทำให้มีความยืดหยุ่นสูง. |
| การยึดที่มั่นคง | แย่. | ดี. |
| การฉีดที่มีข้อบกพร่อง | ไม่สามารถปรับตัวได้: สามารถวางในตำแหน่งที่คงที่เพียงตำแหน่งเดียวเท่านั้น. | ปรับตัวได้ ควบคุมโดยโปรแกรมและซอฟต์แวร์ ต้องการการฝึกอบรมในการทำงานของหุ่นยนต์. |
| เวลาการหมุนเวียนของการดึง | สั้น. | คล้ายกัน ยาวกว่าทั่วไปเล็กน้อย. |
| ตำแหน่งการยึด | แก้ไขหลังการติดตั้ง: โมเดลบางรุ่นอนุญาตให้ปรับความสูงของการยึดได้. | ตำแหน่งใดก็ได้: ควบคุมโดยโปรแกรมและซอฟต์แวร์ ต้องการการฝึกอบรมในการดำเนินงานหุ่นยนต์. |
| การใส่ชิ้นส่วนเสริม | ไม่สามารถปรับตัวได้. | ปรับตัวได้. |
| การตัดขอบการกดเจาะ | ไม่สามารถปรับตัวได้. | ปรับตัวได้. |
การรวมระบบอัตโนมัติของแขนหุ่นยนต์.



ระบบหุ่นยนต์หนึ่งระบบสามารถจัดการการหล่อหลายแบบได้หรือไม่?
ใช่! ระบบการสกัดที่รวมของ TOVONN's เกินกว่าการถอดชิ้นส่วนแบบง่าย ๆ โดยการรวมฟังก์ชันหลายอย่างไว้ในกระบวนการทำงานที่ไร้รอยต่อ. โซลูชันหุ่นยนต์ของเราสามารถทำการสกัด การวางชิ้นส่วน การทำลายการล้น การตัดขอบ การตรวจสอบคุณภาพ และการจัดเรียงชิ้นส่วน—ทั้งหมดในระบบเดียว. ฟังก์ชันการทำงานหลายอย่างนี้ช่วยลดเวลาในการทำงานอย่างมีนัยสำคัญและกำจัดความจำเป็นในการดำเนินการด้วยมือแยกต่างหาก. ทีมวิศวกรรมของเราสามารถปรับแต่งโซลูชันที่รวมฟังก์ชันที่กระบวนการผลิตของคุณต้องการได้อย่างแม่นยำ เพื่อเพิ่มประสิทธิภาพการลงทุนด้านอัตโนมัติของคุณ.
ด้วยระบบการสกัดของ TOVONN's ผู้ผลิตสามารถรวมฟังก์ชันหลายอย่างเข้าด้วยกัน รวมถึงการวางชิ้นส่วน การทำให้เย็น การทำลายบ่อเกิน และการตัดขอบภายในกระบวนการทำงานอัตโนมัติเดียว. โซลูชันของเราเอาชนะข้อจำกัดในการสกัดแบบดั้งเดิม เช่น สปูยาว, ช่องแคบในแม่พิมพ์สามส่วน, และการถอดรันเนอร์ด้วยมือ ซึ่งช่วยเพิ่มประสิทธิภาพการผลิตอย่างมีนัยสำคัญในขณะที่ลดต้นทุนแรงงาน. แต่ละระบบถูกวางแผนอย่างพิถีพิถันโดยใช้ซอฟต์แวร์การจำลอง 3D และสามารถรวมเข้ากับเครื่องหล่อโลหะต่างๆ ได้อย่างราบรื่น รวมถึง TOYO, TOSHIBA, BUHLER, UBE, FRECH และอื่นๆ. ด้วยการนำเทคโนโลยีการสกัดด้วยหุ่นยนต์ของเราไปใช้ ผู้ผลิตไม่เพียงแต่จะเพิ่มผลผลิตและคุณภาพได้สูงขึ้น แต่ยังสร้างสภาพแวดล้อมการทำงานที่ปลอดภัยยิ่งขึ้น ซึ่งสอดคล้องกับข้อกำหนด ESG ที่สำคัญสำหรับการพัฒนาอุตสาหกรรมอย่างยั่งยืน.